












Структура приводов и систем автоматического управления
Основные принципы работы
Гидравлические и пневматические приводы объемного действия широко применяются в:• Металлорежущих станках
• Промышленных роботах и манипуляторах
• Автоматических линиях
• Авиационной, автомобильной и сельскохозяйственной технике
Под объемным действием понимается принцип работы применяемых гидравлических и пневматических устройств, который основан на объемном вытесне¬нии рабочей среды (рабочей жидкости или сжатого воздуха), на высо¬ком модуле упругости жидких рабочих сред и законе Б. Паскаля. Движуща¬яся жидкость обладает тремя видами энергии: энергией положения (ге¬ометрический напор), энергией сжатой жидкости (пьезометрический напор, давление) и кинетической энергией потока (скоростной напор). Два первых вида представляют собой разновидности потенциальной энергии.
Виды энергии рабочей среды
Движущаяся жидкость обладает тремя видами энергии:
|
Тип энергии |
Характеристика |
Пример применения |
|
Энергия положения |
Зависит от высоты массы жидкости относительно плоскости сравнения |
Гидроэлектростанции |
|
Энергия сжатой жидкости |
Потенциальная энергия, связанная с давлением (нормальное напряжение сжатия) |
Машиностроительные приводы |
|
Кинетическая энергия |
Зависит от скорости потока |
Гидродинамические передачи |
Энергия положения характеризуется высотой нахождения массы жидкости относительно плоскости сравнения. Этот вид энергии будет превалировать над другими при описании движения, падающего с некоторой высоты потока движущейся с небольшой скоростью жидкости, например, воды. Поэтому геометрический напор учитывается при создании гидроэлектростанций.
Кинетическая энергия движущейся жидкости зависит от ее скорости. Поэтому этот вид энергии используется при разработке гидродинамических передач, в которых рабочая среда имеет сравнительно высокие скорости движения (например, центробежные насосы).
Энергия сжатой жидкости характеризуется давлением, которое есть по сути своей нормальное напряжение сжатия слоев рабочей среды под действием объемных и поверхностных сил. Поскольку в машиностроительном и мобильном оборудовании масса и скорость движущейся жидкости приводов сравнительно невелики, а перепады высот трубопроводов не превышают нескольких метров, постольку в таких приводах превалирующим является именно энергия сжатой жидкости.
Гидравлическим (пневматическим) приводом называется такое устройство, которое обеспечивает приведение в действие машин или механизмов и состоит из источника энергии, ее потребителей, аппаратуры и трубопроводов, по которым перемещается рабочая среда (жидкость для приводов и сжатый воздух для пневмоприводов).
Среда называется рабочей потому, что является носителем энергии и выполняет определенную работу и ряд функций (смазывание, охлаждение, вынос продуктов износа и др.). По существу действия гидравлический привод является устройством, преобразующим энергию движущейся жидкости в механическую энергию, а пневматический привод—устройством, преобразующим энергию сжатого воздуха тоже в механическую энергию.
Энергия сжатой рабочей среды легко преобразуется в механическую работу. Поясним это на примере простейшего объемного гидравлического привода, приведенного на рис.1 и состоящего из двух цилиндров 1 и 2, соединенных трубопроводом 3.
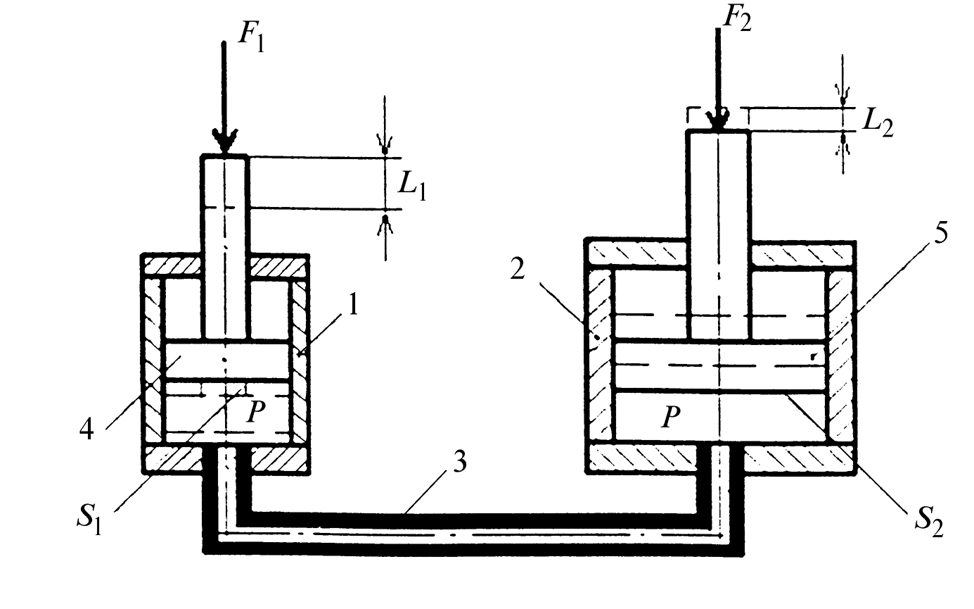
Для того, чтобы поршень цилиндра 2 переместился, преодолевая силу сопротивления F2, на расстояние l2, необходимо совершить работу A = F2l2 . Для этого в нижнюю полость цилиндра 2 с эффективной площадью S2 необходимо подать объем жидкости W = S2l2 под давлением P, определяемым действием силы сопротивления F2, т.е. P = F2 /S2. Этот объем жидкости совершит работу, которая и нужна для перемещения поршня: A= PW = PS2l2 = F2l2. Необходимый объем рабочей среды W имеет массу m = ρS2l2, где ρ - плотность рабочей среды. Если разделить работу A на массу m, получим удельную (единичную) энергию Ey = A/m = PS2l2 /(ρS2l2) = P/ρ. Таким образом, последнее выражение показывает, что каждая частица объема W сжатой рабочей среды плотностью ρ имеет удельную энергию давления P/ρ, которая легко преобразуется в механическую работу. Но для того, чтобы подать рабочую среду в цилиндр 2, нужен, например, еще один цилиндр 1. При движении его поршня 4 вниз рабочая среда будет вытесняться в нижнюю полость цилиндра 2. Однако для выполнения этого движения к поршню цилиндра 1 следует приложить силу F1, которая будет преодолевать силу сопротивления, вызываемую давлением P. В соответствии с законом Паскаля это давление одинаково с давлением в полости цилиндра 2. Тогда без учета сил трения и инерции получим равенство P = F1/S1 = F2/S2 . Отсюда легко видеть, что, приложив к поршню цилиндра 1 силу F1, поршень цилиндра 2 может преодолеть силу F2 во столько раз большую, во сколько раз площадь S2 больше эффективной площади S1, т.е. F2 = F1S2 /S1. С другой стороны, чтобы вытеснить необходимый для перемещения поршня цилиндра 2 объем W, поршень цилиндра 1 должен переместиться на расстояние l1 (без учета возможных утечек). Тогда можно записать W = l2S2 = l1S1. Отсюда нетрудно получить l2 = l1S1 /S2 и сделать вывод о том, что перемещение поршня 5 цилиндра 2 будет меньшим перемещения поршня цилиндра 1 во столько раз, во сколько раз площадь поршня цилиндра 1 меньше площади поршня цилиндра 2. Таким образом, получаем подтверждение «золотого правила» механики для объемных приводов: выигрываем в силе - проигрываем в пути. Такое свойство гидравлических приводов изменять силы и длину перемещения часто называют «гидравлическим рычагом» по аналогии с механическим рычажным устройством.
Рассмотренная работа двух соединенных между собой цилиндров раскрывает принцип действия объемных гидравлических и пневматических приводов, на котором построены и гидравлические усилители, и гидравлические прессы, и другие гидравлические и пневматические машины и устройства.
Выбор того или иного привода при проектировании какого-либо оборудования или машины во многом определяется учетом его особенностей при соответствующих условиях работы.
Особенностями гидравлических приводов являются следующие их характеристики и возможности:
- Высокая энергоемкость:
- Габариты гидродвигателей в 5 раз меньше, чем у электродвигателей аналогичной мощности.
- Отношение мощности к объёму/массе выше, чем у других типов двигателей.
- Высокое давление рабочей среды:
- В общемашиностроительных приводах — до 50 МПа, в специальных — свыше 100 МПа.
- Для сравнения: «давление» магнитного поля в электродвигателях — 0,5–1,0 МПа.
- Бесступенчатое регулирование скорости:
- Диапазон: от 3 мм/мин до 90 м/мин (поступательное движение), от 0,1 до 50 000 об/мин (вращение).
- Коэффициент регулирования скорости достигает 1000.
- Малая инерционность:
- Частота реверсов моторов — до 10 Гц, цилиндров — до 7 Гц.
- Время реверса гидромотора (3,75 кВт) — 0,02 с (быстрее электродвигателей в 100 раз).
- Простота конструкции:
- Отсутствие промежуточных передач между двигателем и исполнительным органом.
- Стабилизация работы при переменных нагрузках и температуре.
- Надёжность:
- Защита от перегрузок за счёт автоматического сброса давления.
- Долговечность благодаря смазке минеральными маслами (минимальный износ).
Недостатки гидравлических приводов
- Нагрев рабочей среды:
- Снижение вязкости жидкости → рост потерь → падение КПД.
- Требуется охлаждение и устранение утечек.
- Сложность обслуживания:
- Необходимость квалифицированного персонала из-за точности оборудования.
- Экологические риски:
- Пожароопасность и загрязнение окружающей среды минеральными маслами.
Дополнительные особенности
- Монтаж: Простота установки гибкими шлангами, независимость компоновки от источника энергии.
К особенностям пневматических приводов относят следующие характеристики и возможности:
Преимущества пневматических приводов
- Высокие скорости:
- Движение: до 15 м/с (поступательное), 100 000 об/мин (вращательное).
- Поток воздуха в трубопроводах: 17–20 м/с (благодаря низкой вязкости).
- Простота управления:
- Цикловое управление с фиксированными упорами.
- Точное позиционирование по жестким упорам.
- Устойчивость к условиям:
- Работа в агрессивных, пожароопасных, запыленных, радиоактивных средах.
- Низкая чувствительность к вибрациям и ударным нагрузкам.
- Конструктивные особенности:
- Простота и надёжность пневмоаппаратов.
- Удобство компоновки (гибкие шланги, отсутствие выхлопных труб).
- Низкая стоимость элементов (давление до 1 МПа).
Недостатки пневматических приводов
- Нестабильность скорости:
- Высокая сжимаемость воздуха → колебания скорости при переменных нагрузках.
- Технические ограничения:
- Коррозия аппаратов из-за конденсации влаги.
- Необходимость принудительной смазки (распыление масла в воздух).
- Требуется подготовка воздуха (сушка, фильтрация).
- Ограничения управления:
- Цикловые системы: позиционирование только в двух точках.
- Необходимость тормозных устройств для защиты упоров.
- Шум:
- Повышенный уровень шума → требуется установка глушителей.
Анализируя указанные особенности приводов и накладывая их на реальные условия работы проектируемого привода, можно определить направление поиска подходящего технического решения в области типа привода.
Классификация гидравлических и пневматических приводов
По служебному назначению
Приводы делятся на три группы:
|
Группа |
Функция |
Примеры |
|
Приводы главного движения |
Обеспечивают основной технологический процесс (например, скорость резания) |
Металлорежущие станки: привод вращения шпинделя, движение резания |
|
Приводы подач |
Формируют вспомогательные движения (например, перемещение стола) |
Металлорежущие станки: привод подачи, позиционирование детали |
|
Приводы вспомогательных движений |
Управляют сервисными операциями (замена инструмента, фиксация) |
Манипуляторы: схват, зажим детали; станки: смена режущего инструмента |
По способу изменения скорости
Приводы различаются по регулировке скорости:
|
Тип привода |
Характеристика |
Применение |
|
Регулируемые |
Изменяют скорость ступенчато или плавно |
Требуют точного контроля (например, станки с ЧПУ) |
|
Нерегулируемые |
Обеспечивают постоянную скорость |
Простые циклы (например, линии сборки) |
Примеры из практики
- Металлорежущий станок:
- Главное движение: Привод резания (скорость вращения шпинделя).
- Подача: Привод перемещения стола.
- Вспомогательные: Привод смены инструмента, зажим детали.
- Промышленный робот:
- Все гидравлические/пневматические приводы (руки, схваты) относятся к вспомогательным движениям, так как основная обработка выполняется станком.
- Классификация позволяет оптимизировать выбор привода под конкретные задачи. Регулируемые системы применяются в сложных технологических процессах, нерегулируемые — в стандартных циклах.